Conversion Specifiers
| %Y | year | %m | month | %d | date |
| %H | hour | %M | minute | %S | second |
| %T | HH:MM:SS | %v | event | %q | frame number |
| %t | camera id number | %D | changed pixels | %N | noise level |
| %i | width of motion area, | %J | height of motion area, | %J | height of motion area, |
| %K | X coordinates of motion center | %L | Y coordinates of motion center | %C | value defined by text_event |
| %f | filename with full path | %n | number indicating filetype | %$ | camera name |
System Processing
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: String
- Range / Valid values:
- Default: Not Defined
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Disable despeckle (comment it out in motion.conf).
- Disable smartmask
- Enable both http control and webcam by setting port numbers. Example 8080 for control and 8081 for webcam.
- Start Motion in setup mode
- View the webcam stream. Either with Iceweasel or with Firefox by entering in the address of http://localhost:8080/
- Open a new tab and connect to the http interface. http://localhost:8080/ . You can now control and change almost anything while Motion is running. To disable a feature enter a space.
- Start by experimenting with noise level. Do this both during daylight and during darkness. You will be surprised to see how much noise a camera makes during night. Try using the automatic noise feature. It should work for most.
- Now try the despeckle feature. Enable it using the recommended default EedDl. If this is not enough experiment. Remember that the l must be the last letter.
- Set the threshold to what you want to trigger Motion.
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not Defined
- Type: Integer
- Range / Valid values: 1 - 9
- Default: 6
- Type: Discreet Strings
- Range / Valid values: See Below
- Default: ALL
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not Defined
- Type: Integer
- Range / Valid values:
- Default: The sequence that the camera file is read
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
daemon
process_id_file
setup_mode
logfile
log_level
log_type
sdl_threadnr
camera
camera_id
camera_name
camera_dir
Video4Linux Device
- Type: String
- Range / Valid values: Max 4095 characters
- Default: /dev/video0 (FreeBSD: /dev/bktr0)
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- V4L2_PIX_FMT_SN9C10X : 0 'S910'
- V4L2_PIX_FMT_SBGGR16 : 1 'BYR2'
- V4L2_PIX_FMT_SBGGR8 : 2 'BA81'
- V4L2_PIX_FMT_SPCA561 : 3 'S561'
- V4L2_PIX_FMT_SGBRG8 : 4 'GBRG'
- V4L2_PIX_FMT_SGRBG8 : 5 'GRBG'
- V4L2_PIX_FMT_PAC207 : 6 'P207'
- V4L2_PIX_FMT_PJPG : 7 'PJPG'
- V4L2_PIX_FMT_MJPEG : 8 'MJPEG'
- V4L2_PIX_FMT_JPEG : 9 'JPEG'
- V4L2_PIX_FMT_RGB24 : 10 'RGB3'
- V4L2_PIX_FMT_SPCA501 : 11 'S501'
- V4L2_PIX_FMT_SPCA505 : 12 'S505'
- V4L2_PIX_FMT_SPCA508 : 13 'S508'
- V4L2_PIX_FMT_UYVY : 14 'UYVY'
- V4L2_PIX_FMT_YUYV : 15 'YUYV'
- V4L2_PIX_FMT_YUV422P : 16 '422P'
- V4L2_PIX_FMT_YUV420 : 17 'YU12'
- Type: String
- Range / Valid values: Max 4095 characters
- Default: /dev/tuner0
- Type: Integer
- Range / Valid values: -1, 0 - 7
- Default: 1 (Disabled) /li>
- Type: Discrete Strings
- Range / Valid values: 0 (PAL), 1 (NTSC), 2 (SECAM), 3 (PAL NC no colour)
- Default: 0 (PAL)
- Type: Integer
- Range / Valid values: 0 - 999999
- Default: 0 (Not set)
- Type: Integer
- Range / Valid values: -1 to 3
- Default: -1
- -1 : Do not modify device setting
- 0 : Power line frequency Disabled
- 1 : 50hz
- 2 : 60hz
- 3 : Auto
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: Integer
- Range / Valid values: 0 - 255
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 0 - 255
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 0 - 255
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 0 - 255
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 1 - 2147483647
- Default: 1
- Type: Integer
- Range / Valid values: 1 - 2147483647
- Default: 1
- Type: Boolean
- Range / Valid values: on, off
- Default: off
videodevice
v4l2_palette
tunerdevice
input
norm
frequency
power_line_frequency
auto_brightness
brightness
contrast
saturation
hue
roundrobin_frames
input or frequency options to change camera.
If multiple cameras use the same video device, they each can capture roundrobin_frames number of frames before having
to share the device with the other cameras.
Round Robin is not relevant for Network cameras or standard USB web cameras. It is used with video capture
cards which have multiple inputs per video chip. This is not the ideal way to run multiple cameras.
When the capture card changes input it takes some time before the decoder chip has syncronized to the new camera.
You can improve this if you have expensive cameras with a syncronize input. Only one camera can be decoded
at a time so if you have 4 cameras connected 3 of the cameras will need to wait for their
turn. The fact that cameras have to take turns and the fact that you have to skip a few frames after
each turn dramatically lowers the possible framerate. You can get a high framerate by viewing each
camera for a long time. But then you may miss the action on one of the inactive cameras. If you can
afford it avoid Round Robin and buy the more expensive type of capture cards that has one decoder chip
per input. If you only need 2 or 3 cameras you can also simply put 2 or 3 cheap TV cards in the computer.
Linux has no problem working with multiple TV cards. (or better yet, it multiple cheap network cameras)
If multiple cameras use the same video device, they each can capture roundrobin_frames number of frames
before having to share the device with the other cameras.
When another camera wants to watch another input or frequency or size the first
roundrobin_skip number of frames are skipped to allow the device to settle.
The last option switch_filter is supposed to prevent the change of camera from being detected
as Motion. Its function is not perfect and sometimes prevents detection of real motion. You should start
with having the option disabled and then try with the option enabled to see if you can skip less frames
without loosing the detection of the type of motion you normally want to detect.
roundrobin_skip
switchfilter
Network Cameras
-
Motion can connect to a network camera through a normal TCP socket. All you need to give it is the URL.
The URL given must return either one single jpeg picture or an mjpeg stream. For the time being Motion
cannot connect to a video stream such a mpeg, mpeg4, divx. The URL must return one single jpeg image, a mjpeg stream
a rtsp stream, file or ftp. When getting a still image, make sure to validate that the camera is serving up
a actual raw JPG file and not a HTML page with an embedded JPG which is the current
standard.
When the netcam_url is defined the video4linux options above are ignored.
If the connection to a network camera is lost, Motion will reuse the last good image for
approx 30 seconds. After 30 seconds the image is replaced by a grey image with a text
telling that the signal is lost and when the connection was lost.
This text and its date format is not configurable.
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- http://
- ftp://
- mjpg://
- rtsp://
- mjpeg://
- file:///
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- off: The historical implementation using HTTP/1.0, closing the socket after each http request.
- force: Use HTTP/1.0 requests with keep alive header to reuse the same connection.
- on: Use HTTP/1.1 requests that support keep alive as default.
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: String
- Range / Valid values: on off
- Default: on
netcam_url
netcam_userpass
netcam_keepalive
netcam_proxy
netcam_tolerant_check
rtsp_uses_tcp
Raspberry Pi Camera
-
Motion can use the Raspberry Pi camera when connected.
Before setting up Motion with the camera, it is recommended that the user first
validate that the camera is functional with the raspistill/raspivid applications.
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Horizontal Flip: -hf
- Vertical Flip: -vf
- Rotation: -rot
mmalcam_name
mmalcam_control_params
Image Processing
- Type: Discrete Strings
- Range / Valid values: 0, 90, 180, 270
- Default: 0 (not rotated)
- Type: Integer
- Range / Valid values: Device Dependent
- Default: 352
- Type: Integer
- Range / Valid values: Device Dependent
- Default: 288
- Type: Integer
- Range / Valid values: 2 - 100
- Default: 100 (no limit)
- Type: Integer
- Range / Valid values: 0 - 2147483647
- Default: 0
- Type: String
- Range / Valid values: EedDl
- Default: Not defined
- Type: Boolean
- Range / Valid values: on, off, preview
- Default: off
- Type: String
- Range / Valid values: box, redbox, cross, redcross
- Default:
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: String
- Range / Valid values: Max 4095 characters
- Default: %Y-%m-%d\n%T
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Default: %Y%m%d%H%M%S
- Type: Boolean
- Range / Valid values: on, off
- Default: off
rotate
width
height
framerate
minimum_frame_time
despeckle
locate_motion_mode
locate_motion_style
text_left
|
text_right
|
text_changes
|
text_event
text_double
Motion Detection
- Type: String
- Range / Valid values: on off
- Default: off
- Type: Integer
- Range / Valid values: 1 - 2147483647
- Default: 1500
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: Integer
- Range / Valid values: 1 - 255
- Default: 32
- Type: Boolean
- Range / Valid values: on, off
- Default: on
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- 1 2 3
- 4 5 6
- 7 8 9
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: Integer
- Range / Valid values: 0 - 10
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 0 - 100
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 1 - 1000s
- Default: 1
- Type: Integer
- Range / Valid values: 0 - 2147483647
- Default: 60
- A timer that timeouts 'event_gap' seconds after the last video frame with motion is detected.
- If 'post_capture' is activated then the gap timer starts counting after the last image of the post_capture buffer has been saved.
- The gap timer is reset and starts all over each time new motion is detected, so you will not miss any action by having a short 'gap' value. It will just create more events (e.g. more mpegs files)
- When the timer runs out the event number is increased by one next time motion is detected. When you use the %v conversion specifier in filenames or text features this means that the number in filename or text increased by one.
- The pre_capture feature only works at the beginning of an event. So if you have a very large 'event_gap' value pre_capture is not working very often.
- When you make movies using the ffmpeg features a new movie file is started at the beginning of an event when the first motion is detected. When 'event_gap' seconds has passed without motion (and post_captured frames saved) the movie files are completed and closed.
- Do not use large event_gap values to generate one large movie file. If Motion stops working this movie file never gets properly completed and closed you will not be able to view it.
- Some of the tracking features sets the camera back to the center position when an event is over.
emulate_motion
threshold
threshold_tune
noise_level
noise_tune
area_detect
mask_file
rotate option, note that the mask is applied after the rotation.
Detailed Description
The mask file must be a pgm format image file (portable gray map). Note that you must choose the BINARY format.
To use this feature create an image of exact the same size as the ones you get from your camera.
Then make it purely white for the areas you want detected and
black for the areas you want ignored. You can also make gray areas where
you want to lower the sensitivity to motion. Normally you will stick to pure black and white.
One method for generating the mask file is as follows.
Take a motion captured picture, edit it with black and white for the mask and export it as a pgm file.
with a program such as gimp.
If you cannot save in this format save as a grayscale jpg and then you can convert it to pgm format with
djpeg -grayscale -pnm [inputfile] > mask.pgm
(assuming you have djpeg installed - part of the jpeg lib package).
Note that the mask file option masks off the detection of motion. The entire picture is still shown on the picture.
This means that you cannot use the feature to mask off an area that you do not want people to see.
Below are an example of a webcam picture and a mask file to prevent the detection cars in the street.
Normal picture. Notice the street is visible through the hedge.
 Mask file (converted to png format so it can be shown by your web browser)
Mask file (converted to png format so it can be shown by your web browser)

|
smart_mask_speed
setup_mode. That way you can
easily adjust smart_mask_speed.
The mask_file option provides a static mask to turn off sensitivity in certain areas.
This is very useful to mask a street with cars passing by all day long etc...
But imagine a scenario with large bushes and big trees where all the leaves are moving
in the wind also triggering motion from time to time even with despeckle turned on. Of
course you can also define a static mask here, but what if the bushes are growing during
spring and summer? Well, you have to adapt the mask from time to time. What if the camera
position moves slightly? What if someone grows new plants in your garden? You always have to setup a new static mask.
The answer to this problem is the smart mask feature A dynamic, self-learing mask.
Smart mask will disable sensitivity in areas with frequent motion (like trees in the wind).
Sensitivity is turned on again after some time of no more motion in this area. The built mask
is a bit larger at the borders than the actual motion. This way smartmask works more reliably
when sudden moves occur under windy conditions.
lightswitch
minimum_motion_frames
event_gap
Script Execution
-
Motion can execute external commands based on the motion detection and related events.
They are described in the sections below.
Security Warning!
These features mean you have to pay attention to the following.
- Anyone with access to the remote control port (http) can execute any command on your computer with the same privileges as the user running Motion. Anyone can access your control port if you have not either limited access to localhost or limited access using firewalls in the server. You should always have a router between a machine running Motion with remote control enabled and the Internet and make sure the Motion control port is not accessible from the outside.
- If you limit control port to localhost you still need to take care of any user logging into the server with any kind of GUI or terminal session. All it takes is a browser or single command line execution to change settings in Motion.
- It is a good idea to run Motion as a harmless user. Not as root!!
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
on_event_start
on_event_end
on_picture_save
on_motion_detected
on_area_detected
on_movie_start
on_movie_end
on_camera_lost
Output - General Options
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: Integer
- Range / Valid values: 0 - 100s
- Default: 0 (disabled)
- Type: Integer
- Range / Valid values: 0 - 2147483647
- Default: 0 (disabled)
- Type: String
- Range / Valid values: Max 4095 characters
- Default: Not defined = current working directory
quiet
pre_capture
post_capture which does not cost any performance hit or RAM
space.
post_capture
target_dir
Output - Picture Options
-
Motion can output different types of pictures. The normal picture is indicated below.
- Type: Discrete Strings
- Range / Valid values: on, off, first, best
- Default: on
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: Integer
- Range / Valid values: 1 - 100
- Default: 75
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: Integer
- Range / Valid values: 0 - 2147483647
- Default: 0 (disabled)
- Type: String
- Range / Valid values: Max 4095 characters
- Default: %v-%Y%m%d%H%M%S-snapshot
- Type: String
- Range / Valid values: Max 4095 characters
- Default: %v-%Y%m%d%H%M%S-%q
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
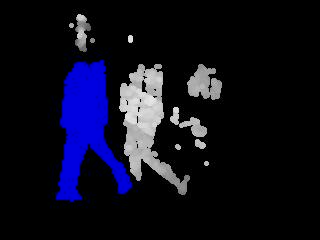
 The motion type picture or also referred to as a debug picture is shown
below. Note that the largest area is blue and only this is counted as Motion.
The Motion image shows how Motion maintains a "reference frame" which is not just the last picture frame
but a mathematical calculation of the past images. This enlarges real Motion and ensures that it is not easy to
sneak in slowly.
The motion type picture or also referred to as a debug picture is shown
below. Note that the largest area is blue and only this is counted as Motion.
The Motion image shows how Motion maintains a "reference frame" which is not just the last picture frame
but a mathematical calculation of the past images. This enlarges real Motion and ensures that it is not easy to
sneak in slowly.
output_pictures
output_debug_pictures
quality
picture_type
snapshot_interval
snapshot_filename
picture_filename
exif_text
Output - Movie Options
- Type: Integer
- Range / Valid values: 0 (infinite) - 2147483647
- Default: 3600
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: Boolean
- Range / Valid values: on, off
- Default: off
- Type: Boolean
- Range / Valid values: 0 - 2147483647
- Default: 0 (disabled)
- Type: Discrete Strings
- Range / Valid values: hourly, daily, weekly-sunday, weekly-monday, monthly, manual
- Default: daily
- Type: Integer
- Range / Valid values: 0 - 9999999
- Default: 400000
- Type: Integer
- Range / Valid values: 0 - 100
- Default: 0 (disabled)
- Type: Discrete Strings
- Range / Valid values: mpeg1, mpeg4, msmpeg4, swf, flv, ffv1, mov, ogg, mp4, mkv, hevc
- Default: mpeg4
- mpg - Creates mpg file with mpeg-2 encoding. If motion is shutdown and restarted, new pics will be appended to any previously created file with name indicated for timelapse.
- mpeg4 - Creates avi file with the default encoding. If motion is shutdown and restarted, new pics will create a new file with the name indicated for timelapse.
- mpeg4 or msmpeg4 - gives you files with extension .avi
- swf - gives you a flash film with extension .swf
- flv - gives you a flash video with extension .flv
- ffv1 - FF video codec 1 for Lossless Encoding
- mov - QuickTime
- ogg - Ogg/Theora
- mp4 - MPEG-4 Part 14 H264 encoding
- mkv - Matroska H264 encoding
- hevc - H.265 / HEVC (High Efficiency Video Coding)
- Type: String
- Range / Valid values: Max 4095 characters
- Default:
- Type: String
- Range / Valid values: Max 4095 characters
- Default: %v-%Y%m%d%H%M%S
- Type: String
- Range / Valid values: Max 4095 characters
- Default: %v-%Y%m%d-timelapse
max_movie_time
ffmpeg_output_movies
ffmpeg_output_debug_movies
ffmpeg_timelapse
ffmpeg_timelapse_mode
ffmpeg_bps
ffmpeg_variable_bitrate
ffmpeg_video_codec
ffmpeg_duplicate_frames
movie_filename
timelapse_filename
Output - Pipe Options
-
The video4linux driver is written by the same author that first created Motion. You can
find the source within apt packages.
The video4linux device is a Kernel module which installs itself as a video pipe.
It has an input and an output. The module simply takes anything that comes on its input
and send it out at the output. The purpose of this is to create a standard video4linux type video
device that other programs can then use. You may now ask: "What do I need that for?".
Only one program can access a video device at a time. When motion is using a camera -
no other program can access the same camera. But motion is made to be able to feed a video signal
to the video loopback device. This way an additional program can watch the signal from a camera that
motion uses already. What you see is not the live camera stream but the exact same picture that motion
uses for detecting motion and the same pictures that are saved/streamed. You can also choose to
see the "motion" type images where you see the pixels that are changing - live.
When you install the video loopback device it will create an input -
for example /dev/video5 and an output - for example /dev/video6. You can then tell motion to "pipe"
the video signal to the /dev/video5 and look at the pictures live using e.g. Camstream on /dev/video6.
Camstream is "fooled" to think it is looking at a real camera.
Installing
Installing the video loopback device is not difficult. At least not when you have this document available.
First you must prepare your system for more video devices. You will need two extra devices for each video
pipe that you want.
For example if you have 4 cameras they will probably run at
/dev/video0, /dev/video1, /dev/video2, and /dev/video3. So you will need additional 8 video devices.
This is easy to do.